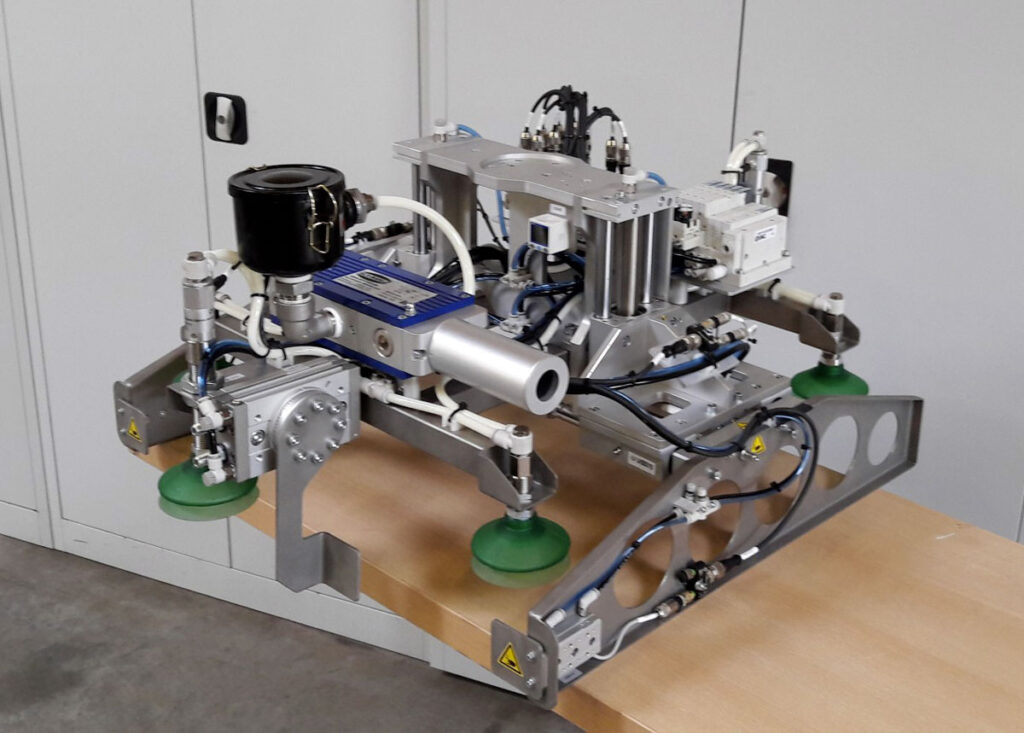
De robotgrijper in combinatie met het invoerstation zijn ontwikkeld om plano dozen vanaf een stapel op te pakken en tijdens de vlucht uit te vouwen. Vervolgens wordt de open gevouwen doos op het invoerstation door de robot vastgehouden en wordt er een coil van 35kg in de doos geschoven. Als deze coil in de doos zit, dan vouwen de robotgrijper en invoerstation de doos verder dicht, zodat deze dichtgeplakt kan worden.